RonGinger
Well-Known Member
A friend in town built an ROV a couple years ago that got me started thinking about building one as well. It
seems like a perfect project for me- it requires a lot of building which I can use my CNC equipment for, and
it will require some electronics and programming for control. And when its done it will be useful from my
small Ranger 21 tugboat.
I found the <a href="http://openrov.com"> OpenROV.com</a> web site and spent a lot of time looking at it. I almost
bought the kit several times, but I was just not happy with the way they mounted the motors out in the open water.
That might work in fresh water, but I will use my ROV in salt water.
I guess some other guys did not like the open motors because they started a kickstarter project to design and build a self contained thruster, the <a href="http://bluerobotics.com"> T100</a> I bought into the kickstarter for 2 thrusters. I thought I would do my vertical control with a ballast tank.
When the Thrusters arrived about the end of November I decided it was time to get serious. I spent a lot of time browsing the web and a few forums on home built ROVs and began to generate design ideas. I spent several hours in the plumbing departments of Home depot and Lowes trying to find PVC pipe fittings that would work.
I will use a piece of 4" PVC for the main hull. Since this will contain the electronics it must be watertight, but it also must be easy to open to make changes and charge the batteries. My fist attempt at an end cap was
to make a disk with a flange that would slip into the pipe with an O ring seal. I made the disk from some
scraps of a PVC house trim material a friend was using on a project. As I was making the disk I measured the inside of the pipe and discovered it was way out of round, and had several lumps that ran down the length of the pipe. Clearly this would never make an O ring seal.
Next I got a threaded plug fitting and tried to modify it to make it easier to remove, but still a tight seal. Eventually it became clear this was not going to work either, there was not enough material in the pipe end to make the shoulder for the O ring.
I finally settled on a simple flat plate with an O ring and a circle of bolts. To make the end of the pipe thick enough for the o ring groove and the bolt circle I added a pipe coupling which made the wall thickness about 1/2" inch.
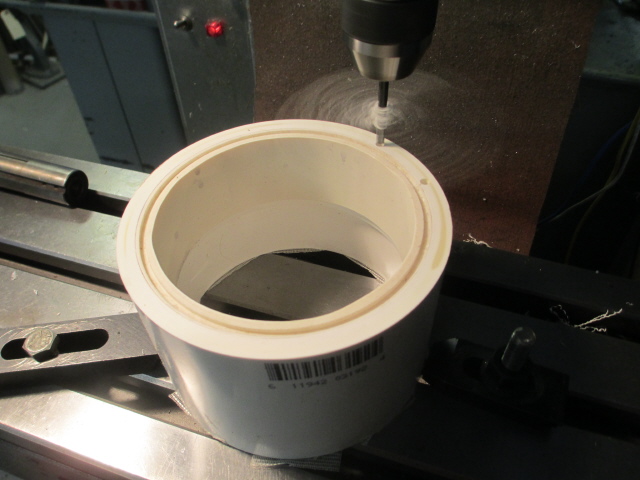
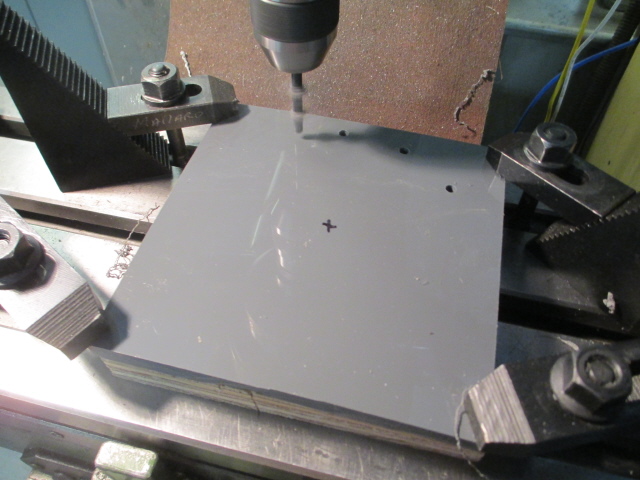
Here is the coupling being stuck to the mill table with double sided carpet tape, then having the bolt circle drilled.

Next I used the CNC mill to make the end plate with a 12 hole bolt circle. I made one of the solid grey PVC and the other of clear acrylic for the video camera.
I gave up on the idea of a ballast tank for verticle control. I do not think it will give me the response I need
to follow along the bottom looking for treasure ! So I ordered a third T100 truster.
My first design used a flat sheet of PVC as a wing like structure with the main tube under it. I used
some 1" pipe to be the landing gear, but when it was all assembled I didn't like the look, it seemed to be to
spindly.

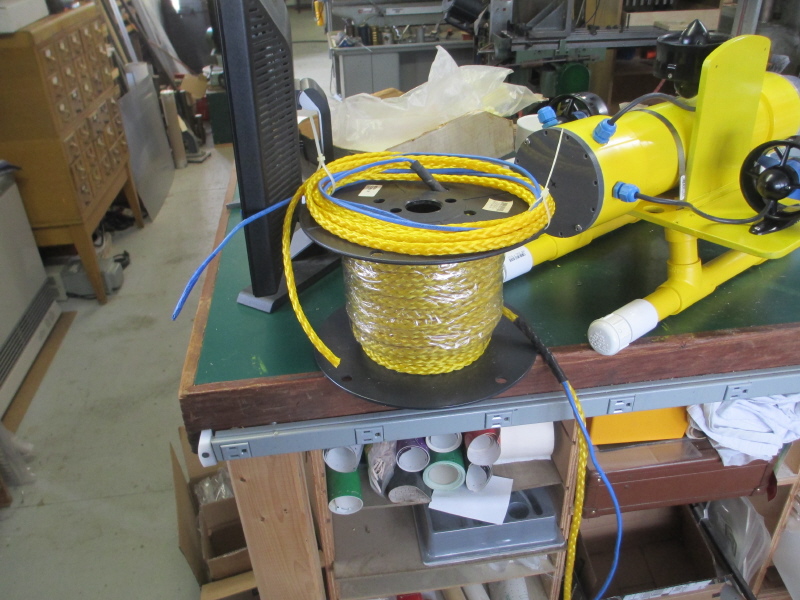
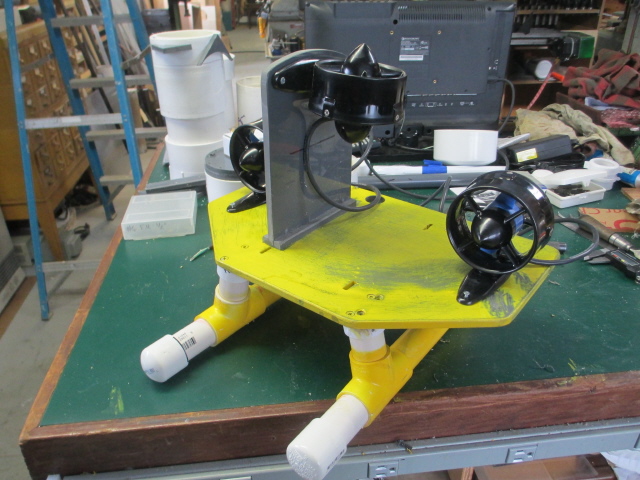
I cut the landing gear down and moved the main tube to the top. Once it was assembled I temporarily added the thrusters to see what it will look like. I think I am happy with this design and can now turn to the electronics and control.




seems like a perfect project for me- it requires a lot of building which I can use my CNC equipment for, and
it will require some electronics and programming for control. And when its done it will be useful from my
small Ranger 21 tugboat.
I found the <a href="http://openrov.com"> OpenROV.com</a> web site and spent a lot of time looking at it. I almost
bought the kit several times, but I was just not happy with the way they mounted the motors out in the open water.
That might work in fresh water, but I will use my ROV in salt water.
I guess some other guys did not like the open motors because they started a kickstarter project to design and build a self contained thruster, the <a href="http://bluerobotics.com"> T100</a> I bought into the kickstarter for 2 thrusters. I thought I would do my vertical control with a ballast tank.
When the Thrusters arrived about the end of November I decided it was time to get serious. I spent a lot of time browsing the web and a few forums on home built ROVs and began to generate design ideas. I spent several hours in the plumbing departments of Home depot and Lowes trying to find PVC pipe fittings that would work.
I will use a piece of 4" PVC for the main hull. Since this will contain the electronics it must be watertight, but it also must be easy to open to make changes and charge the batteries. My fist attempt at an end cap was
to make a disk with a flange that would slip into the pipe with an O ring seal. I made the disk from some
scraps of a PVC house trim material a friend was using on a project. As I was making the disk I measured the inside of the pipe and discovered it was way out of round, and had several lumps that ran down the length of the pipe. Clearly this would never make an O ring seal.
Next I got a threaded plug fitting and tried to modify it to make it easier to remove, but still a tight seal. Eventually it became clear this was not going to work either, there was not enough material in the pipe end to make the shoulder for the O ring.
I finally settled on a simple flat plate with an O ring and a circle of bolts. To make the end of the pipe thick enough for the o ring groove and the bolt circle I added a pipe coupling which made the wall thickness about 1/2" inch.
Here is the coupling being stuck to the mill table with double sided carpet tape, then having the bolt circle drilled.
Next I used the CNC mill to make the end plate with a 12 hole bolt circle. I made one of the solid grey PVC and the other of clear acrylic for the video camera.
I gave up on the idea of a ballast tank for verticle control. I do not think it will give me the response I need
to follow along the bottom looking for treasure ! So I ordered a third T100 truster.
My first design used a flat sheet of PVC as a wing like structure with the main tube under it. I used
some 1" pipe to be the landing gear, but when it was all assembled I didn't like the look, it seemed to be to
spindly.
I cut the landing gear down and moved the main tube to the top. Once it was assembled I temporarily added the thrusters to see what it will look like. I think I am happy with this design and can now turn to the electronics and control.